Introducción a los Sistemas de Control: Funcionamiento, Tipos y Aplicaciones
Se utilizan sistemas de control siempre que una máquina mantiene un valor estable de forma automática, como la temperatura, la velocidad o el nivel.Este artículo explica qué es un sistema de control, cómo funcionan juntas sus partes y cómo la retroalimentación mantiene la salida correcta.También verás los principales tipos de sistemas y cómo se comportan en funcionamiento.Se incluyen usos, beneficios y límites comunes.Catálogo
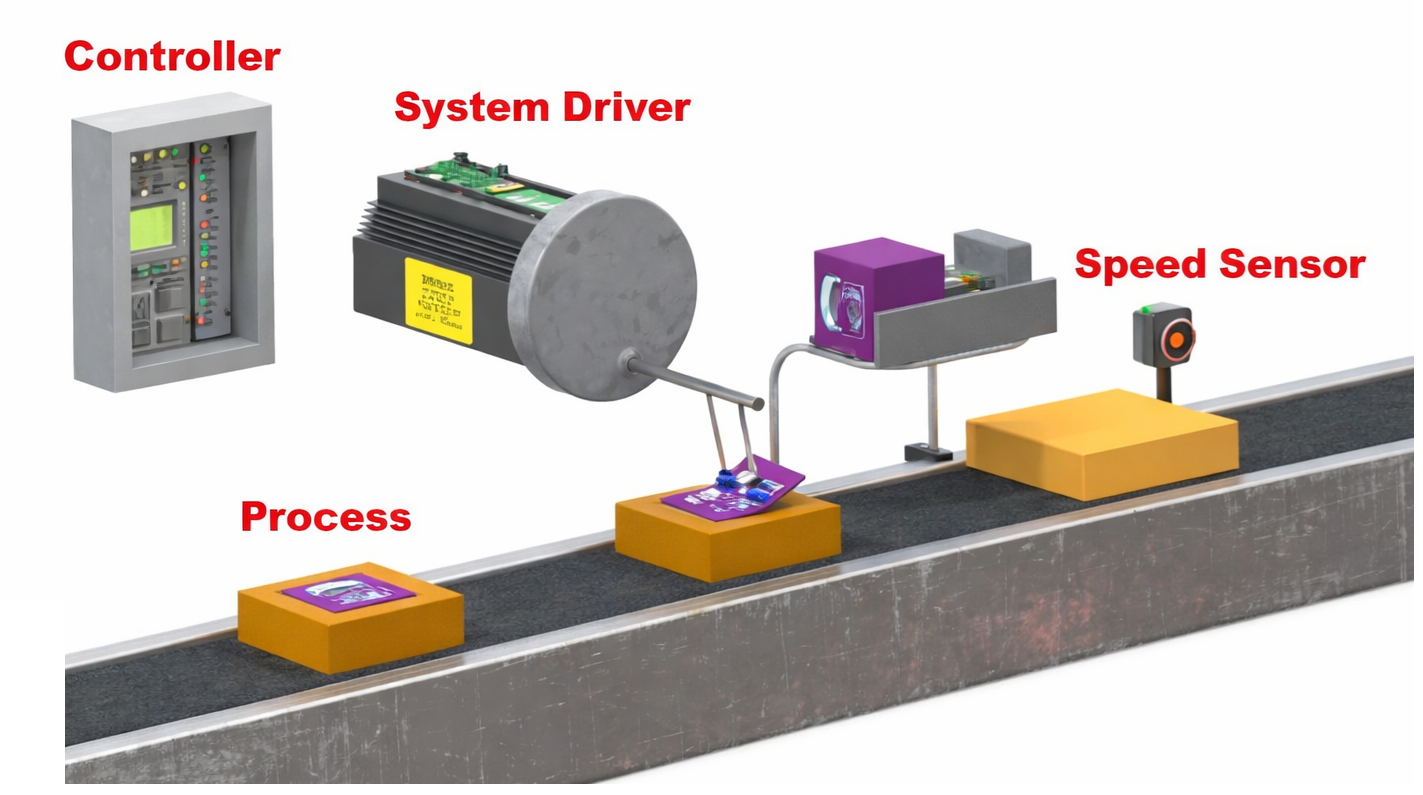
Figura 1. Ejemplo de sistema de control
¿Qué es un sistema de control?
Un sistema de control es un sistema que mantiene un valor medido cerca de un valor objetivo deseado.Su propósito es ajustar automáticamente un proceso para que el resultado se mantenga correcto incluso cuando las condiciones cambian.Por ejemplo, un termostato de ambiente mantiene la temperatura cerca del nivel establecido y el control de crucero del automóvil mantiene el vehículo a una velocidad seleccionada.Un controlador de nivel del tanque de agua también mantiene la altura del agua en una marca elegida.En términos simples, un sistema de control verifica y corrige continuamente una variable para que coincida con el valor requerido.
Elementos básicos de un sistema de control
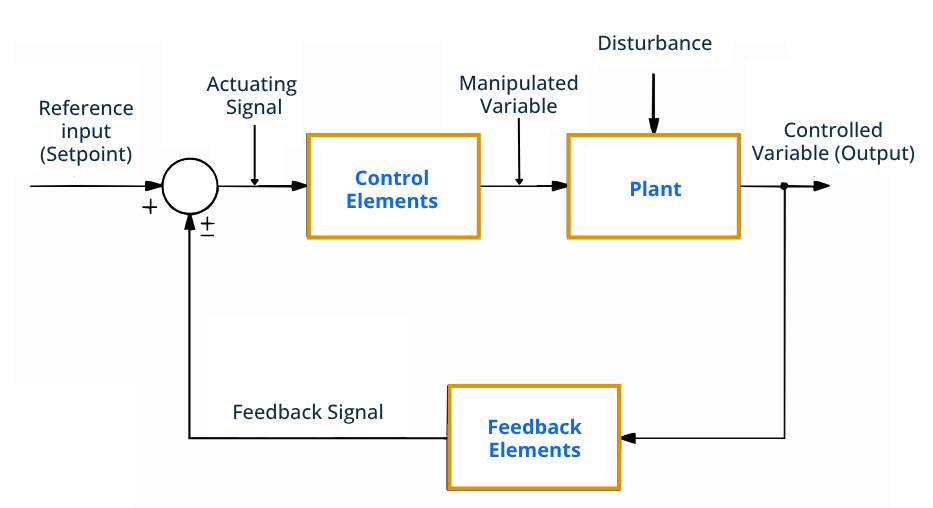
Figura 2. Diagrama de bloques del sistema de control
Un sistema de control está formado por varias piezas estándar, cada una de las cuales realiza una tarea específica.
• Entrada de referencia (punto de ajuste)
Este es el valor deseado que el sistema intenta mantener.Representa la condición objetivo seleccionada.El sistema siempre compara el valor real con esta referencia.
• Señal de actuación
Esta es la señal producida después de comparar los valores deseados y reales.Representa cuánto ajuste se necesita.La señal prepara el sistema para la corrección.
• Elementos de control
Estas partes manejan el proceso de toma de decisiones.Determinan la acción correctiva en función de la señal recibida.El resultado de esta etapa prepara el proceso de ajuste.
• Variable manipulada
Esta es la cantidad ajustable enviada al proceso.Cambiar este valor influye en el resultado final.Es la variable que el sistema puede variar directamente.
• planta
La planta es el proceso que se controla.Produce el valor de salida final.El sistema tiene como objetivo mantener esta producción en el nivel deseado.
• Perturbación
Este es un cambio no deseado que afecta el proceso.Puede alejar la salida del valor deseado.El sistema debe compensarlo.
• Variable controlada (salida)
Este es el resultado medido real del proceso.Muestra el estado actual del sistema.El objetivo es mantenerlo igual a la entrada de referencia.
• Elementos de retroalimentación
Estos miden la salida y envían información para su verificación.Proporcionan al sistema la condición actual.Esto permite determinar la corrección.
• Señal de retroalimentación
Esta es la información devuelta sobre el valor de salida.Representa la condición del proceso.El sistema lo utiliza para comparar.
Principio de funcionamiento del sistema de control

Figura 3. Principio de funcionamiento del sistema de control
El principio de funcionamiento de un sistema de control comienza con la entrega al sistema de un valor de entrada deseado.Luego, el sistema compara este valor con el valor de salida real.La diferencia entre ellos se llama señal de error.Si el error existe, el sistema genera una señal de corrección.Esta corrección ajusta el proceso para reducir el error.La salida cambia y se vuelve a comprobar continuamente.El ciclo se repite hasta que la salida coincida estrechamente con el valor deseado.
Características de los sistemas de control
Los sistemas de control se evalúan en función de su rendimiento durante la operación.Estas características describen la calidad y confiabilidad de la respuesta del sistema.
|
Características |
Descripción |
|
Estabilidad |
La salida no
no divergir;vuelve a un valor estable después de la perturbación |
|
Precisión |
Error final ≤
±2–5% del valor establecido |
|
Precisión |
Salida
variación ≤ ±1% bajo la misma entrada |
|
Tiempo de respuesta
|
Inicial
la reacción ocurre dentro del tiempo de retardo medido (td) |
|
tiempo de subida |
Tiempo desde 10%
al 90% del valor final |
|
Tiempo de asentamiento |
Entra y
permanece dentro de la banda de ±2% |
|
Sobrepasar |
El pico excede
valor final en % del importe |
|
Estado estacionario
error |
constante
compensación restante después de la estabilización |
|
Sensibilidad |
ΔSalida /
ΔRelación de cambio de parámetros |
|
Robustez |
Mantiene
funcionamiento a pesar del cambio de perturbaciones |
|
Ancho de banda |
Opera
efectivamente hasta −3 dB de frecuencia de corte |
|
Repetibilidad |
Misma entrada
produce la misma salida dentro de la tolerancia |
|
Fiabilidad |
Opera
sin fallo durante el tiempo de funcionamiento nominal (MTBF) |
|
Amortiguación |
Oscilación
decaimiento determinado por la relación de amortiguación ζ |
|
Velocidad de
Respuesta |
tiempo total para
alcanzar una condición estable |
Tipos de sistemas de control
Los sistemas de control se clasifican según cómo manejan la información, las señales y el comportamiento de respuesta.Se agrupan según el uso de retroalimentación, la forma de la señal y el comportamiento matemático.
Sistema de control de bucle abierto

Figura 4. Diagrama del sistema de control de circuito abierto
Un sistema de control de bucle abierto es un sistema donde la salida no influye en la acción de control.El sistema envía un comando y asume que el resultado es correcto sin comprobarlo.Como no existe una ruta de retroalimentación, no puede corregir automáticamente errores o perturbaciones.El rendimiento depende principalmente de la calibración y las condiciones de funcionamiento adecuadas.Estos sistemas son simples, de bajo costo y fáciles de diseñar.Sin embargo, los cambios en la carga o el entorno pueden afectar el resultado final.Los ejemplos comunes incluyen un temporizador de tostadora eléctrica, un control del temporizador de una lavadora y un temporizador de riego fijo.
Sistema de control de circuito cerrado

Figura 5. Diagrama del sistema de control de circuito cerrado
Un sistema de control de circuito cerrado es un sistema que utiliza retroalimentación para ajustar su salida automáticamente.El sistema mide el resultado y lo compara con el valor deseado.Si aparece una diferencia, se aplica una corrección para reducir el error.Este ajuste continuo permite un funcionamiento preciso y estable incluso cuando las condiciones varían.Los sistemas de circuito cerrado proporcionan mayor precisión y confiabilidad que los sistemas de circuito abierto.Se utilizan ampliamente en aplicaciones modernas de control automático.Los ejemplos típicos incluyen el control de temperatura del aire acondicionado, el control de crucero del vehículo y los reguladores automáticos de voltaje.
Sistema de control de tiempo continuo

Figura 6. Señal de control de tiempo continuo (analógica)
Un sistema de control de tiempo continuo procesa señales que cambian suavemente con el tiempo.La entrada y la salida existen en cada instante sin interrupción.Estos sistemas suelen funcionar con señales eléctricas o mecánicas analógicas.Como las señales son continuas, la respuesta también es suave y natural.Los sistemas de tiempo continuo se encuentran comúnmente en los controladores analógicos tradicionales.Son adecuados para procesos físicos que requieren una reacción inmediata.Los ejemplos incluyen reguladores de velocidad analógicos, control de volumen del amplificador de audio y control de posición de la válvula hidráulica.
Sistema de control de tiempo discreto

Figura 7. Señal de control de tiempo discreto (digital)
Un sistema de control de tiempo discreto opera utilizando señales de datos muestreados.El sistema verifica y actualiza los valores solo en intervalos de tiempo específicos.Estas señales suelen ser procesadas por controladores digitales o microprocesadores.La salida cambia paso a paso en lugar de hacerlo continuamente.Estos sistemas permiten un funcionamiento programable y un ajuste flexible.Se utilizan ampliamente en el control electrónico e informático moderno.Los ejemplos incluyen el control de temperatura basado en microcontroladores, el control digital de la velocidad del motor y los termostatos domésticos inteligentes.
Sistema de control lineal
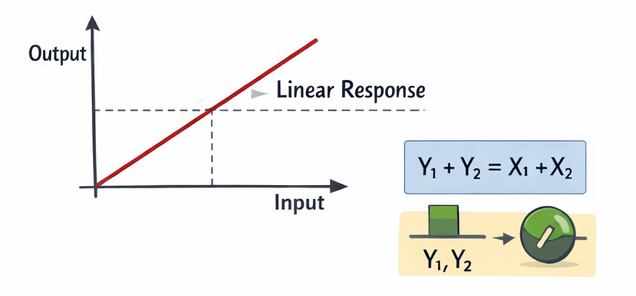
Figura 8. Relación entrada-salida del sistema lineal
Un sistema de control lineal sigue una relación proporcional entre entrada y salida.Si la entrada se duplica, la producción también se duplica en las mismas condiciones.Estos sistemas satisfacen el principio de superposición según el cual los insumos combinados producen productos combinados.El comportamiento lineal permite un análisis matemático fácil y predecible.La mayoría de los diseños de control teóricos asumen una operación lineal por simplicidad.Los modelos lineales ayudan a diseñar sistemas estables y precisos.Los ejemplos incluyen amplificadores electrónicos de pequeña señal y regiones de control de motores de baja carga.
Sistema de control no lineal

Figura 9. Características de respuesta del sistema no lineal
Un sistema de control no lineal tiene una salida que no es proporcional a la entrada.La respuesta cambia según el rango o las condiciones de funcionamiento.Pequeños cambios en los insumos pueden producir grandes variaciones en la producción o ningún cambio en absoluto.A menudo aparecen efectos como saturación, histéresis y zonas muertas.Estos sistemas son más difíciles de analizar pero representan procesos físicos con mayor precisión.Muchos sistemas se comportan naturalmente de forma no lineal.Los ejemplos incluyen límites de movimiento del brazo robótico, comportamiento del actuador magnético y control de flujo de válvula en posiciones extremas.
Ventajas y desventajas de los sistemas de control.
Los sistemas de control mejoran la coherencia y reducen el esfuerzo manual, pero también introducen complejidad y costes.
Ventajas de los sistemas de control
• El sistema mantiene la salida cerca del valor requerido durante la operación.
• Los operadores no necesitan seguir ajustando el equipo a mano.
• Las máquinas pueden funcionar durante largas horas sin paradas frecuentes.
• El sistema corrige los cambios en las condiciones automáticamente.
• El estado de funcionamiento se puede comprobar desde un panel o pantalla remota.
Desventajas de los sistemas de control
• El costo de instalación es mayor que el de los sistemas manuales simples.
• Se necesitan trabajadores calificados para la instalación y el servicio.
• Los sensores y piezas electrónicas pueden fallar con el tiempo.
• Encontrar la causa de los problemas puede llevar más tiempo.
• El sistema depende de energía eléctrica estable.
Aplicaciones de los sistemas de control
Los sistemas de control se utilizan tanto en la automatización industrial como en los equipos cotidianos para mantener un funcionamiento adecuado de forma automática.
1. Fabricación industrial
Las máquinas de producción mantienen dimensiones y calidad constantes del producto.Las líneas de montaje automatizadas utilizan regulaciones para garantizar la repetibilidad.Esto reduce el desperdicio y mejora la eficiencia.
2. Regulación de temperatura
Los equipos de calefacción y refrigeración mantienen condiciones ambientales confortables.Los edificios dependen del ajuste automático para estabilizar el clima interior.Esto mejora la eficiencia energética y el confort.
3. Sistemas de transporte
Los vehículos utilizan control de velocidad y estabilidad para un funcionamiento más suave.Los automóviles modernos incluyen control de crucero y sistemas de tracción.Estos mejoran la seguridad y el rendimiento de la conducción.
4. Sistemas de energía
Las redes eléctricas regulan los niveles de voltaje y frecuencia.Los generadores ajustan la producción para satisfacer la demanda de carga.Esto garantiza un suministro eléctrico estable.
5. Robótica y Automatización
Los robots realizan tareas precisas de posicionamiento y movimiento.Las máquinas automatizadas funcionan continuamente con alta precisión.Esto permite la fabricación avanzada.
6. Equipo médico
Los dispositivos mantienen condiciones operativas controladas durante el tratamiento.El equipo de monitoreo mantiene los valores dentro de límites seguros.Esto mejora la seguridad y confiabilidad del paciente.
7. Electrodomésticos
Los dispositivos cotidianos administran automáticamente la configuración de operación.Lavadoras y refrigeradores mantienen condiciones adecuadas de funcionamiento.Esto simplifica las tareas diarias.
8. Sistemas aeroespaciales
Los aviones y drones mantienen condiciones de vuelo estables.La guía automática mantiene la orientación y altitud correctas.Esto admite una navegación confiable.
Sistema de control versus automatización versus sistemas integrados
Estas tecnologías están estrechamente relacionadas pero tienen diferentes propósitos de ingeniería dentro de los productos electrónicos e industriales modernos.
|
Característica |
controlar
Sistema |
Automatización |
Incrustado
Sistema |
|
Enfoque principal |
Regulación de
variables |
Proceso
ejecución |
Dispositivo
operación |
|
Propósito |
mantener
valor deseado |
Realizar tareas
automáticamente |
Ejecutar dedicado
funciones |
|
Alcance |
Específico
comportamiento del proceso |
entero
flujo de trabajo
|
soltero
dispositivo del producto |
|
decisión
Capacidad |
Basado en
valores medidos |
Basado en
lógica programada |
Basado en
firmware |
|
Uso de comentarios |
A menudo
requerido |
Opcional |
Opcional |
|
Tipo de hardware |
Sensores y
actuadores |
maquinas y
controladores |
Microcontrolador
tablero |
|
Función del software |
Cálculo
y corrección |
Secuenciación
y coordinación |
Dispositivo
lógica de control |
|
Tipo de respuesta |
Continuo
ajuste |
Tarea
ejecución |
Operación funcional |
|
Tamaño del sistema |
Pequeño a
medio |
Medio a
grande |
muy pequeño |
|
Flexibilidad |
moderado |
Alto |
Limitado |
|
tiempo
Requisito |
Alto |
moderado |
Alto |
|
Solicitud
Nivel |
Nivel de proceso |
Nivel de planta |
Nivel de producto |
|
Ejemplo |
Temperatura
controlar |
Fábrica
línea de producción |
reloj inteligente |
|
Integración |
parte de
automatización |
Contiene
sistemas de control |
Soporta ambos |
Conclusión
Los sistemas de control mantienen la estabilidad comparando continuamente la producción real con un valor objetivo y corrigiendo cualquier error.Su desempeño depende de elementos centrales como la retroalimentación, la acción del controlador y el proceso controlado.Diferentes clasificaciones definen cómo se manejan las señales y con qué precisión responde un sistema a las perturbaciones.Debido a estas capacidades, los sistemas de control se aplican ampliamente en la industria, el transporte, la energía, los dispositivos médicos y los equipos cotidianos.
Acerca de nosotros
ALLELCO LIMITED
Lee mas
Consulta rápida
Envíe una consulta, responderemos de inmediato.
Preguntas frecuentes [FAQ]
1. ¿Cuál es la diferencia entre un controlador y un sistema de control?
Un controlador es sólo el dispositivo de toma de decisiones (como un PLC o un controlador PID).Un sistema de control incluye el controlador más sensores, actuadores y el proceso que se regula.
2. ¿Qué es el control PID y por qué es importante?
El control PID utiliza acciones proporcionales, integrales y derivativas para minimizar el error de forma rápida y fluida.Mejora la estabilidad, la precisión y la velocidad de respuesta en la mayoría de los sistemas industriales.
3. ¿Por qué a veces los sistemas de control oscilan o oscilan?
La oscilación ocurre cuando las correcciones son demasiado agresivas o retrasadas.Una mala sintonización, sensores lentos o una ganancia excesiva hacen que la salida se sobrepase repetidamente.
4. ¿Qué es la saturación del actuador?
La saturación del actuador ocurre cuando el actuador alcanza su límite físico y no puede aumentar más la salida.Esto evita que el sistema corrija errores grandes.
5. ¿Cómo manejan los sistemas de control los retrasos en los procesos?
Utilizan métodos de ajuste, filtros o algoritmos predictivos para compensar el retraso, de modo que la corrección se produzca en el momento adecuado.

Guía de resistencias de 4,7 kΩ: código de colores, usos, pruebas y comparación de valores
en 16/02/2026

Disyuntor en miniatura (MCB): principio de funcionamiento, tipos, clasificaciones y guía de selección
en 15/02/2026
Publicaciones populares
-

Computadoras de conjunto de instrucciones complejas: ¿Cómo cambiaron la informática?
en 17/04/8000 147722
-

USB-C Pinout y características
en 17/04/2000 111811
-

Uso de primitivas de simulación unificadas Xilinx: una guía completa para el diseño y simulación FPGA
en 17/04/1600 111331
-

Voltajes de fuente de alimentación en electrónica: significado de VCC, VDD, VEE, VSS y GND
en 17/04/0400 83666
-

Guía del conector RJ45: pinout, cableado, tipos de cables y usos
en 01/01/1970 79405
-

La mejor guía para los códigos de color de alambre en sistemas eléctricos modernos
La forma en que nuestros sistemas eléctricos usan colores no es solo para looks.Cada color de cable ahora indica una función específica, lo que hace que sea más fácil identificar y manejar componen...en 01/01/1970 66820
-

Factor de calidad (q): ecuaciones y aplicaciones
El factor de calidad, o 'Q', es importante al verificar qué tan bien funcionan los inductores y los resonadores en sistemas electrónicos que usan frecuencias de radio (RF).'Q' mide qué tan bien un ...en 01/01/1970 62977
-

Guía de la válvula de purga: función, síntomas, pruebas y reemplazo para un rendimiento óptimo del motor
La válvula de purga es una parte clave del sistema de un automóvil que ayuda a mantener el aire limpio al administrar los vapores de combustible antes de que puedan escapar a la atmósfera.Esto no s...en 01/01/1970 62873
-

Lograr el rendimiento máximo con el teorema de transferencia de potencia máxima
El teorema de transferencia de potencia máxima explica cómo la energía de una fuente, como una batería o generador, fluye a una carga conectada.Muestra la condición exacta en la que la carga recibe...en 01/01/1970 54053
-

A23 Especificaciones y compatibilidad de la batería
La batería A23 es una batería pequeña en forma de cilindro con alto voltaje.También llamado 23A, 23AE o MN21, funciona a 12 voltios y mucho más alto que las baterías AA o AAA.Su diseño esp...en 01/01/1970 52039
Número de pieza caliente
-

M24C02-WMN6TP
STMicroelectronics
IC EEPROM 2KBIT I2C 400KHZ 8SOIC
LT3506AEDHD#PBF
Analog Devices Inc.
IC REG BUCK ADJ 1.6A DL 16DFN
SMBJ12CA-13-F
Diodes Incorporated
TVS DIODE 12VWM 19.9VC SMB
RLZTE-1120D
Rohm Semiconductor
DIODE ZENER 19.1V 500MW LLDS
1SMB5922B
Rectron USA
DIODE ZENER 7.5V 3W SMB
RWM04102700JR15E1
Vishay Sfernice
RES WIREWOUND 270 OHM 3W
TPS2818DBVR
Texas Instruments
IC GATE DRVR LOW-SIDE SOT23-5
DN1102W-TR
Stanley Electric Co
LED LAMP
TLV2763IDGSRG4
Texas Instruments
IC OPAMP GP 500KHZ RRO 10VSSOP
LMR36015FBRNXR
Texas Instruments
IC REGULATOR BUCK
RSS075P03TB
Rohm Semiconductor
MOSFET P-CH 30V 7.5A 8SOP
IRFH5303TR2PBF
Infineon Technologies
MOSFET N-CH 30V 23A/82A 8PQFN
12107A220JAT2A
AVX Corporation
CAP CER 22PF 500V NP0 1210
TPS40200HD
Texas Instruments
IC REG CTRLR BUCK 8SOIC
GRM1555C2A7R0DA01D
Murata Electronics
CAP CER 7PF 100V C0G/NP0 0402
AD9388ABSTZ-170
Analog Devices Inc.
IC GRAPHIC DIGITIZER 144-LQFP
MP1518DG-LF-P
Monolithic Power Systems Inc.
IC LED DRVR RGLTR PWM 350MA 8QFN
CDSOD323-T03C
Bourns Inc.
TVS DIODE 3.3VWM 19VC SOD323 -

22255C684KAT2A
KYOCERA AVX
CAP CER 0.68UF 50V X7R 2225
LR2512-R10FW
TT Electronics/Welwyn
RES SMD 0.1 OHM 1% 2W 2512
NTE5917
NTE Electronics, Inc
DIODE GEN PURP 200V 20A DO4
CU4032K75G2
EPCOS (TDK)
VARISTOR 120V 1.2KA 4032
HSMH-C170
Broadcom Limited
LED RED DIFFUSED CHIP SMD
LT1991AIMS#TRPBF
Analog Devices Inc.
IC OPAMP PGA 1 CIRCUIT 10MSOP
ISL6608CBZ
Renesas Electronics America Inc
IC GATE DRVR HALF-BRIDGE 8SOIC
ISL60002CIH320Z-TK
Renesas Electronics America Inc
IC VREF SERIES 0.12% SOT23-3
MMBT3904,215
Nexperia USA Inc.
TRANS NPN 40V 0.2A TO236AB
SM6S33AHE3_A/I
Vishay General Semiconductor - Diodes Division
TVS DIODE 33VWM 53.3VC DO218AB
PI3USB10MZEEX
Diodes Incorporated
IC USB SWITCH DUAL 2X1 12TDFN
MAX3222ECWN+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 18SOIC
ATA8402C-6AQY-66
Microchip Technology
RF TX IC ASK 429-439MHZ 8TSSOP
MBR1645
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 45V 16A TO220AC
SUD50N06-09L-E3
Vishay Siliconix
MOSFET N-CH 60V 50A TO252
S6010VS2TP
Littelfuse Inc.
SCR 600V 10A TO251
JMK105BJ474KE-R
Taiyo Yuden
CAP CER 0.47UF 6.3V X5R 0402
FLZ10VB
Fairchild Semiconductor
DIODE ZENER 9.7V 500MW SOD80 -

LIFCL-40-8BG400C
Lattice Semiconductor Corporation
IC FPGA 192 I/O 400CABGA
06035U1R7BAT2A
KYOCERA AVX
CAP CER 1.7PF 50V NP0 0603
PIC10LF322T-E/OT
Microchip Technology
IC MCU 8BIT 896B FLASH SOT23-6
EPF6016AFC100-3
Intel
IC FPGA 81 I/O 100FBGA
FX8-140S-SV
Hirose Electric Co Ltd
CONN RCPT 140POS SMD GOLD
CSR1011A05-IQQA-R
Qualcomm
IC RF TXRX+MCU BLUETOOTH 56VFQFN
R6200450XXOO
Powerex Inc.
DIODE GEN PURP 400V 500A DO200AA
ISL6840IBZ
Renesas Electronics America Inc
IC REG CTRLR BOOST/FLYBACK 8SOIC
AD5302BRMZ-REEL7
Analog Devices Inc.
IC DAC 8BIT V-OUT 10MSOP
EL2250CSZ
Elantec
VIDEO AMPLIFIER
LCMXO2280C-3FTN256I
Lattice Semiconductor Corporation
IC FPGA 211 I/O 256FTBGA
BD90620EFJ-CE2
Rohm Semiconductor
IC REG BUCK ADJ 2.5A 8HTSOP-J
LTM2882IV-3#PBF
Analog Devices Inc.
DGT ISO 2500VRMS 4CH RS232 32LGA
EMK042CG040CC-FW
Taiyo Yuden
CAP CER 4PF 16V C0G/NP0 01005
0402YC183KAT2A
KYOCERA AVX
CAP CER 0.018UF 16V X7R 0402
ADUM2200ARWZ
Analog Devices Inc.
DGTL ISO 5000VRMS 2CH GP 16SOIC
MAX505BCWG+
Analog Devices Inc./Maxim Integrated
IC DAC 8BIT V-OUT 24SOIC
SC1566I5M2.5TRT
Semtech Corporation
IC REG LINEAR 2.5V 3A TO263-5